
2013年高空作业车产品概述
中国产业研究报告网讯:
内容提要:高空作业车由于是载人高空作业,作业人员的安全及其安全感极为重要。如果作业平台运动起始和终止的瞬间产生冲击或运动过程速度波动,都会导致作业人员的心理恐惧,因而高空作业车作业平台运动启动、停止、运动过程速度平稳非常重要。但传统的控制技术难以实现作业平台的平顺运动,需要在对电液元件及其技术充分理解的基础上,综合运用闭环控制技术、电液元件的特性技术、理论力学和材料力学等多学科理论和实践经验解决。
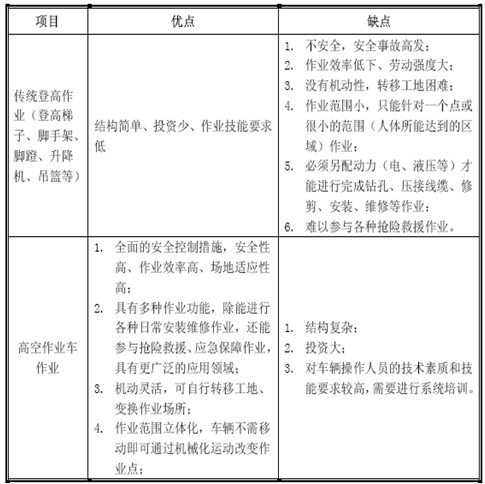
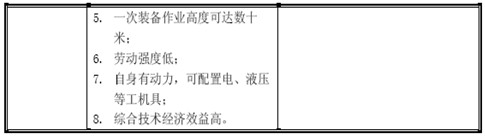
高空作业车是一种将作业人员、工具、材料等通过作业平台举升到空中指定位置进行各种安装维修、抢险救援(电力事故、台风、雨雪等自然灾害)等作业的移动式专用高空作业装备,属于高空作业平台的一种。高空作业车作为先进、安全的登高作业技术装备替代了落后的登高梯、脚蹬、吊篮等作业方式,其应用是伴随着安全生产、文明施工意识的提高而产生的。高空作业车为装备制造业中的重要施工设备,对国民经济高效运行具有重要保障作用,其保有量也是衡量一个国家对安全生产的重视程度和施工文明程度的重要标志。高空作业车作业与传统登高作业方式优缺点对比:
高空作业车主要由行走底盘、取力及操纵系统、作业支撑系统(副车架、支腿等)、走台板及覆盖件总成、防护系统、照明系统、回转支承总成、转台总成、臂架总成、工作平台及平衡系统、电气控制及操纵系统、液压传动系统、液压控制及其操纵系统、备用动力系统、专用功能模块等系统组成。高空作业车产品既属于专用机械设备,也属于专用车辆,但与传统的工程机械和改装车辆产品具有显著差异,其技术难点主要体现为以下方面:
① 臂架结构技术
臂架是高空作业车最为重要的部件,其涉及高空作业车的功能、性能、安全性、环境适应性和作业效率,因此臂架从结构上有折叠、伸缩、伸缩+折叠、联动折叠+伸缩、多组伸缩+折叠等多种形式,臂架截面有矩形、多边形、凸形多边形等,为提高强度和刚度,还需要在必要的截面位置采取加强措施等。臂架结构的设计必须基于机构运动学、结构力学、材料力学、计算机仿真技术等多学科建立的力学模型才能获得最佳设计方案。
② 智能控制技术
智能控制是高空作业车实现高安全性、高作业效率和高环境适应性的必要技术手段,其主要难点在于:
A、多学科技术交叉:高空作业车智能控制技术集成了智能控制技术、传感技术、信息化和通讯技术、复杂机械结构技术以及液压传动和控制技术,是典型的光机电液一体化高新技术,需要机械、自动化、计算机、液压、微电子、汽车等多专业技术人员联合攻关才能完成研发。
B、智能控制技术解决的核心问题是高空作业车安全性涉及的多要素的联合监控,包括平台载荷、臂架长度、臂架仰角、支腿跨距、平台所处方位、混合臂架中各组臂间的即时位置关系以及具体的作业环境和工况,任何一个指标超过安全值都有可能出现安全事故,因而联合监控极为复杂。
C、由于机构运动必然有惯性,产品在安全控制方面必须有提前量,而提前量因机构质量不同、质心位置不同、机构运动速度不同、平台载荷不同等而各不相同,单一的理论计算、经验公式计算、试验摸索都不能得到最佳方案,必须由具有多学科专业技术和经验丰富的技术人员结合三种方法才能完成研发工作。
③ 作业平台运动平顺性
高空作业车由于是载人高空作业,作业人员的安全及其安全感极为重要。如果作业平台运动起始和终止的瞬间产生冲击或运动过程速度波动,都会导致作业人员的心理恐惧,因而高空作业车作业平台运动启动、停止、运动过程速度平稳非常重要。但传统的控制技术难以实现作业平台的平顺运动,需要在对电液元件及其技术充分理解的基础上,综合运用闭环控制技术、电液元件的特性技术、理论力学和材料力学等多学科理论和实践经验解决。
④ 运动轨迹控制技术
传统高空作业车作业平台的运动轨迹只有一条或两条,远远不能满足实际复杂多变的作业环境的要求,通常需要具有直线(水平、垂直)运动、曲线运动、平面运动、甚至跨越障碍运动的要求,仅凭机械结构调整难以实现,必须在机械机构和结构优化的基础上,集成运用智能控制技术、传感技术、信息化和通讯技术以及液压传动与控制技术才能实现。
⑤ 整车结构设计与底盘匹配
A、由于底盘发动机和变速箱均布置在前桥附近,致使高空作业车上车重心必须靠近后桥,以解决前桥超重、后悬和后伸可能超过国家标准并使整车长度过长等问题。因此,整车结构与底盘匹配在重心位置、转台回转中心位置、臂架和支腿的结构形式等方面的技术问题必须统筹解决。
B、由于高空作业车行驶处于基本满载状态,且工作时整车靠支腿支撑离开地面,使底盘大梁处于经常性的交变应力受力状态(行业内常出现大梁断裂现象)。因此,底盘大梁与副车架的联结方式和位置、整车重心位置和主要质心布置、臂架支撑方式和位置、支腿位置的设计等为整车设计的难题。
⑥ 整车轻量化技术
整机轻量化一直是国产机械设备的难题,高空作业车也不例外。对高空作业车而言其轻量化的重要意义在于可以采用更小吨位的汽车底盘,进而降低生产成本、客户采购费用,实现更高的环境适应性、道路行驶通过性和更低的使用成本。要实现轻量化,必须在选材、结构形式、截面变化等多方面进行全面的设计分析和复杂的运动学和力学计算,才能获得最佳方案。
⑦ 结构强度和刚度的匹配
高空作业车支腿、副车架和臂架等主要结构件不仅要有足够的强度以满足工作要求,还必须有足够的刚度,以满足作业人员在高空作业的安全感心理需求,这必然使结构件庞大、笨重,因此使其结构强度和刚度实现最佳匹配并使结构达到小型化、轻量化便成为技术开发的难点。
⑧ 结构件加工和成型技术
高空作业车主要的结构件为臂架、副车架和支腿箱,与一般的工程机械和专用汽车产品结构件不同在于,其既是焊接结构件,又是机加工件,且基本尺寸大、加工精度要求高,因此其下料精度要求高,下料后须经过整形、铣边、折弯才能焊接成型,要求焊后变形小,需要采取反变形措施,特别是折弯,不同材料尤其是高强度材料,不同材质、不同厚度、在不同季节,其工艺参数都不尽相同,需要长时间、大量的工艺试验研究才能获取最佳的工艺方案。
最新行业报告
- 2017-2022年中国医用腹膜透析机行业市场监测与投资趋势研究报告
- 2017-2022年中国股票配资行业市场监测与投资前景预测报告
- 2017-2022年中国心电监护系统行业市场监测与投资战略咨询报告
- 2017-2022年中国旋臂起重机行业市场监测与投资决策咨询报告
- 2017-2022年中国助力机械手行业市场监测与投资方向研究报告
- 2017-2022年中国搬运型机器人行业市场分析与发展策略咨询报告
- 2017-2022年中国码垛机器人行业市场监测与投资前景研究报告
- 2017-2022年中国酪蛋白行业市场分析与发展策略研究报告
- 2017-2022年中国单甘酯行业市场分析与发展机遇预测报告
- 2017-2022年中国氨基磺酸行业市场分析与发展机遇研究报告